Inhaltsverzeichnis
Grundlagen und Informationen
Hier finden Sie in loser Folge technische Grundlagen, Hilfen und Informationen zum Open Car System. Meist aus konkreten Problemen im Forum abgeleitet, zum schnellen Auffinden nun archiviert.
Modulaufbau
OpenCar wie auch OpenDCC mit seinen BiDiB Komponenten ist zu großen Teilen als kostengünstiges Selbstbau System konzipiert. Das ergibt nicht mit allen Baugruppen mehr Sinn, teils weil die Baugrößen so klein sind, dass Sie es nicht mehr selbst aufbauen möchten, teils weil es inzwischen so viele Nutzer gibt, dass eine industrielle Bestückung (bzw. Vorbestückung) nicht teuerer ist als wenn Sie sich die Bauteile alle einzeln beschaffen und sie dann noch selber bestücken müssen. Wenn Sie aber Module selbst aufbauen, sollten Sie nicht wild einher bestücken, sondern sich eine sinnvolle Reihenfolge angewöhnen und das Zwischenergebnis immer überprüfen. In den Anleitungen haben die Entwickler meist versucht so eine Reihenfolge deutlich zu beschreiben und auch alle notwendigen Tests anzugeben. Bitte bauen Sie bei negativen Zwischentest nicht weiter! Es ergibt keinen Sinn, einen Mikrocontroller zu bestücken, wenn der Netzteilbereich noch nicht funktioniert! Der Controller geht sofort kaputt und der Aufwand bis zur funktionierenden Baugruppe steigt dann deutlich an (Controller wieder ablöten ohne Beschädigung der Platine …).
Wenn Sie Ihre Baugruppen selbst aufbauen und in Betrieb nehmen, sollten Sie sich nach Möglichkeit ein geregeltes, strombegrenzendes! Labornetzteil anschaffen. Einfache, preiswerte Geräte wie z.B. das PeakTech® P 6080 A sind hier auch völlig ausreichend. Dabei wird die Strombegrenzung zur Baugruppeninbetriebnahme auf einen Wert unter 100 mA eingestellt. Wenn Sie sich wirklich überhaupt kein Labornetzteil anschaffen möchten (oder können), sollten Sie Ihre Baugruppen mit einem externen Schutzwiderstand in Betrieb nehmen. 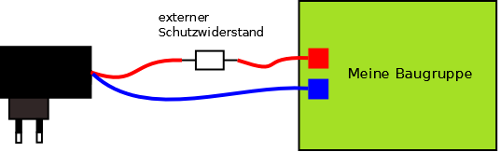 Dieser Schutzwiderstand muss sinnvoll bemessen sein. Bei 12V Baugruppen könnte das ein 100 Ohm Widerstand sein. Damit ist der Strom, der durch die Baugruppe fließen kann, dann auch auf einen ungefährlichen Maximalwert begrenzt. Unsere Baugruppen benötigen alle im inaktiven Erstinbetriebnahme-Zustand Betriebsströme im zweistelligen Milliampere Bereich, was mit solch einer Kombination gegeben ist. Eine Lötbrücke o.ä. zieht dann aber nicht gleich verheerende Folgen nach sich.
Dieser Schutzwiderstand muss sinnvoll bemessen sein. Bei 12V Baugruppen könnte das ein 100 Ohm Widerstand sein. Damit ist der Strom, der durch die Baugruppe fließen kann, dann auch auf einen ungefährlichen Maximalwert begrenzt. Unsere Baugruppen benötigen alle im inaktiven Erstinbetriebnahme-Zustand Betriebsströme im zweistelligen Milliampere Bereich, was mit solch einer Kombination gegeben ist. Eine Lötbrücke o.ä. zieht dann aber nicht gleich verheerende Folgen nach sich.
Carsystem, wie fange ich an?
Schritt für Schritt! Auf keinen Fall alles mit einem Mal! Beginnen Sie mit einem fertigen Faller© Fahrzeug, bauen Sie eine Teststraße dafür und lassen Sie das Fahrzeug dort fahren. Testen Sie verschiedene Straßentypen, Kreuzungen, Abzweigungen und Stoppstellen. Finden Sie dabei Ihren persönlichen Favoriten beim Straßenbau, alles andere baut darauf auf. Wenn diese Voraussetzungen vorhanden sind, dann fangen Sie an, sich Schritt für Schritt in Ihr persönliches Carsystem einzuarbeiten. Da ist auf der einen Seite das Fahrzeug und auf der anderen Seite die Steuerung. Für beides gibt es verschiedene Lösungen in Aufbau und Konstruktion. Für ein OpenCar gesteuertes Fahrzeug benötigen Sie mindestens:
- ein Fahrzeug, das erste, vorzugsweise ein großes (LKW) original Faller© Carsystem Fahrzeug
- einen Fahrzeugdecoder zur Ansteuerung im Fahrzeug (vergleichbar mit einem Lokdecoder in einer Lokomotive)
- eine DCC Digitalsteuerung zum Erzeugen der Steuerbefehle mit angeschlossenem IR Sender
in einem zweitem Schritt folgt dann später noch:
- ein Funkempfänger zum Empfang von Funksteuerbefehlen an das Fahrzeug
- eine Funkbasis zum Senden der Funksteuerbefehle an die Fahrzeuge
Beginnen Sie mit dem Decodereinbau in das Fahrzeug. Dazu finden Sie gesonderte Tipps und Hinweise im Forum und im Handbuch. Mindestens notwendig zum Betrieb des Fahrzeugdecoder sind zwei Fototransistoren in der Fahrzeugfront. Diese werden später auch für eine Kommunikation zwischen den Fahrzeugen bzw. zur Abstandsregelung benötigt. Zu Bauteiltypen und Montageart und Ort am Fahrzeug gibt es Informationen im Handbuch und weiter unten im Kapitel Abstandsregelung. Der Fahrzeugmotor wird auch in diesem ersten Schritt an den Fahrzeugdecoder angeschlossen (irgendwas wollen Sie ja steuern  ). Auch dazu finden Sie im Handbuch oder im Kapitel Fahrzeugmotor weitere Informationen. Auf der Fahrzeugseite ist erst einmal nicht mehr notwendig. Zum Ansteuern dieses ersten Aufbaus ist ein normales DCC Gleissignal nötig, welches mit Infrarot Licht an das Fahrzeug übertragen wird. Dies kann man z.B. mit diesem Aufbau machen:
). Auch dazu finden Sie im Handbuch oder im Kapitel Fahrzeugmotor weitere Informationen. Auf der Fahrzeugseite ist erst einmal nicht mehr notwendig. Zum Ansteuern dieses ersten Aufbaus ist ein normales DCC Gleissignal nötig, welches mit Infrarot Licht an das Fahrzeug übertragen wird. Dies kann man z.B. mit diesem Aufbau machen:
Die Fahrzeuge lassen sich darüber mit einem 28 Fahrstufen DCC Signal (ab Cardecoder Firmware V0.3.x auch mit 128 Fahrstufen DCC Signal) steuern und am Programmiergleis programmieren. Mehr ist zu einem ersten Test nicht nötig.
Im zweiten Schritt können Sie Ihr Fahrzeug auf Funksignalsteuerung erweitern. Dazu wird am Fahrzeugdecoder ein Funkmodul angeschlossen. Für die Ansteuerung kann an das vorhandene DCC Gleis eine Funkbasis angeschlossen werden. Es kann aber auch eine autonome Funkbasis oder eine BiDiB-Funkbasis verwendet werden. Über den Funkweg ist eine erheblich stabilere und höhere Reichweite als mit dem IR Signal möglich.
Für diesen zweiten Schritt müssen Sie sich eine Funkbasis aufbauen, alternativ dazu steht im Fichtelbahn Shop eine SMD vorbestückte Variante zur Verfügung. Weitere Informationen dazu finden sie im Kapitel -> Funk Basen.
Wenn dies alles stabil arbeitet, fangen Sie an, Ihr Fahrzeug mit LEDs zur Beleuchtung und IR Dioden zur Abstandsregelung auszurüsten. Näheres finden Sie wieder im Handbuch oder hier unter „LEDs“ und „Abstandsregelung“.
Zum Schluss machen Sie sich noch Gedanken, über die Fahrzeug Akkus, Anschlussbuchsen und integrierte Stoppstellentechnik, die Sie in Ihrem Carsystem verwenden wollen.
Abstandsregelung ASR
… einer der Gründe für ein Carsystem, wenn nicht sogar „die Aufgabe“ des Carsystems für einen realistisch wirkenden Straßenverkehr auf der Moba. Blockstellen-Betrieb auf der Straße? Ultraschall Positionsbestimmung mit „riesigen“ Empfängern, welche maximal in große H0 Fahrzeuge passen? Alles möglich, aber nicht optimal. Entweder sieht es nicht realistisch aus, oder ist sehr teuer und nur für größere Fahrzeuge geeignet. Es muss also eine einfache, kleine Lösung gefunden werden ein realistisches Verhalten der Fahrzeuge untereinander nachzubilden.
Das OpenCar-System (wie auch andere Carsysteme) nutzt dafür Infrarot Licht. Ein OpenCar-System Fahrzeug sendet an seinem Heck zyklisch zwei verschiedene Infrarot Signale aus. Die Intensität dieser Signale ist unterschiedlich, so dass sie von einem nachfolgendem Fahrzeug in unterschiedlicher Entfernung wahrgenommen werden können. Mit dieser Methode lassen sich unterschiedliche Abstände der Fahrzeuge zueinander je nach Geschwindigkeit und Verkehrssituation erzielen.
Mit dieser Methode lassen sich unterschiedliche Abstände der Fahrzeuge zueinander je nach Geschwindigkeit und Verkehrssituation erzielen.
Wo liegen die Grenzen der IR Abstandsregelung? Wie können Sie die ASR optimal aufbauen? Die IR Dioden im Fahrzeugheck senden Licht und dieses bereitet sich gerade aus! Aus diesem Grund ist es günstig, wenn alle Fotobauteile in der selben Höhe an den Fahrzeugen verbaut werden. Weiterhin verbessern vorn leicht nach außen gerichtete Fototransistoren dem Empfang bei Kurvenfahrt. Im Gegenverkehr kann es passieren, das die aneinander vorbei fahrenden Fahrzeuge sich gegenseitig „sehen“ und beide fälschlicherweise stark abbremsen. Aus diesem Grund besteht die Möglichkeit, für beide Fahrtrichtungen unterschiedlich kodierte IR Signale zu verwenden. Was bleibt, sind durch Fremdlicht übersteuerte Fototransistoren an der Fahrzeugfront. Hier haben sich „schwarze“ auf den Empfang von IR Licht optimierte Fototransistoren an der Fahrzeugfront bewährt.
Aber auch diese können durch pulsierendes Licht oder extreme direkte Beleuchtung übersteuert werden und so für die IR Strahlung der voraus fahrenden Fahrzeuge unempfindlich sein. Dies muss bei der Anlagenkonzeption berücksichtigt werden. Direkte Sonneneinstrahlung oder PWM gedimmte Anlagenbeleuchtung in unmittelbarer Nähe zu den Fahrzeugen sollte möglichst vermieden werden. Dies ist auch der Grund warum darauf verzichtet wurde, die LED Beleuchtung der Fahrzeugdecoder elektronisch zu dimmen um deren Helligkeit gezielt verändern zu können. Bei der Bauteilauswahl sollten Sie möglichst immer identische Fotobauteile verwenden, um bei allen Fahrzeugen gleiche Regelungsabstände zu erzielen. Die Cardecoder haben einen ASR Testmode, mit deren Hilfe Sie die exakte Funktion der Fotobauteile am Fahrzeug überprüfen können.
ASR Anlagenbeleuchtung
Das Umgebungslicht beeinflusst die Funktion der ASR. Dies ist der größte Nachteil der optischen ASR. Baugröße, einfacher und platzsparender Aufbau sind wiederum die Vorteile der optischen Lösung. Im folgenden eine Übersicht über verschiedene Beleuchtungsverhältnisse und deren Auswirkung auf die ASR.
| Lichtquelle | Auswirkung | Bemerkung |
|---|---|---|
| Glühlampe 60W | stört massiv | an 220V~ in 1m Entfernung |
| Halogen Baustrahler 150W | ASR außer Funktion | extrem hell für diesen Test muss mit F4 die Stoppstelle deaktiviert werden |
| Halogen Reflektorlampe 12V 20W | stört massiv | am AC Netzteil ist schlechter als mit Glühlampe, ASR Funktion nicht mehr brauchbar |
| Halogen Reflektorlampe 12V 20W | wenig | an 12V Gleichspannung, ist sehr hell, stört nur bei sehr naher (unter 20 cm) direkter Beleuchtung |
| LED Spot 12V 5W | wenig | gleiches Verhalten wie Halogenlampe an Gleichspannung, dabei ist die noch heller |
| Leuchtstoffröhre 120cm 36W | keine | stört überhaupt nicht, ASR läuft wie vorgesehen |
| LED Röhre 120cm 20W | keine | die ist erheblich heller als die alte Leuchstoffröhre, stört auch nicht |
| IWY WLAN LED Lampe 7,5W | keine | egal bei welcher Farbe und ob gedimmt oder nicht auch direkt über den Fahrzeugen, keine Beeinflussung |
| Energiesparlampe | keine | an 220V~ auch in unmittelbarer Nähe über den Fahrzeugen ist keine Beeinflussung zu erkennen |
| LED Taschenlampe kaltweiß 1W | keine | direkt in die Fototransistoren gehalten |
| ohne Beleuchtung | minimal | gefühlt sinkt der Abstand etwas |
| Sonne | ASR außer Funktion | je nach Einstrahlung wird die ASR komplett außer Betrieb gesetzt |
ASR im Detail
Die ASR nutzt zwei eigene DCC codierte Telegramme, die mit Adressen aus dem für Erweiterungen reserviertem Bereich operieren. Diese beiden Telegramme werden mit unterschiedlich starker IR Leistung am Fahrzeugheck abgestrahlt. Das schwächere (ASR low Signal) mit IR Strom von ca. 5mA, das starke (ASR high Signal) mit ca. 20mA. Die ASR ist damit ein Hauptenergieverbraucher im Fahrzeug!
 In die ASR Signale sind die wichtigsten Rückmelde- und Anhängerbeleuchtungs-Informationen integriert. Die beiden ASR Befehle haben (ab Firmware V0.3.0) folgenden Aufbau:
In die ASR Signale sind die wichtigsten Rückmelde- und Anhängerbeleuchtungs-Informationen integriert. Die beiden ASR Befehle haben (ab Firmware V0.3.0) folgenden Aufbau:
| ASR DCC Signale | |||
|---|---|---|---|
| Adresskennung_ASR_low | Datenbyte_1 | Datenbyte_2 | DCC_XOR_Prüfbyte |
| Adresskennung_ASR_high | Datenbyte_1 | Datenbyte_2 | DCC_XOR_Prüfbyte |
Die zeitliche Länge einer DCC kodierten Nachricht ist vom Inhalt abhängig, da Null- und Eins-Bits mit unterschiedlich langen Pulsen Kodiert sind. Um für die ASR eine konstante Anzahl von Nachrichten zu erhalten und auch etwas den Strombedarf der ASR zu optimieren, wird alle 25ms eine neue ASR Übertragung begonnen. Dabei werden beide ASR Signale abwechselnd übermittelt.
Die Beleuchtung eines Anhängers wird mit dem ASR low Signal übermittelt, so dass ein Anhänger alle 50ms einen neuen Beleuchtungsstatus für die Anhängerbeleuchtung bekommt. Damit leuchten die Blinklichter im Anhänger noch ausreichend synchron zu denen im Zugfahrzeug.
Zum Regeln des Abstandes wertet die ASR das Vorhandensein und deren Häufigkeit der beiden ASR Signale aus. Dabei wird auch die Anzahl der eintreffenden ASR Signale mit einbezogen, da die fehlerfreie Übertragung der Signale mit sinkendem Abstand zunimmt. Dabei gibt es drei Eckpunkte für die Regelung:
- es wird überhaupt ein ASR high Signal erkannt
- es wird zusätzlich ein ASR low Signal erkannt
- es wird eine bestimmte Anzahl von ASR low Signalen erkannt
Die folgende Beschreibung ändert sich mit Cardecoder Firmware V0.3.x teilweise!
Erstens ist der Punkt, auf den fahrende Fahrzeuge versuchen, ihren Abstand zu halten. Ein folgendes Fahrzeug versucht seine Geschwindigkeit so anzupassen, dass es immer um die Erkennungsgrenze des high Signals herum folgt. Im Fahrbetrieb ist Punkt zwei die „Notbremse“ bei der ein folgendes Fahrzeug schnell auf V-min abbremst. Wenn es dann noch näher auffährt und Punkt drei erreicht, bleibt es auch stehen. Dies kommt hauptsächlich bei unterschiedlichen V-min der Fahrzeuge vor, wenn ein Nachfolger nicht mehr langsamer fahren kann als der Vorausfahrende. Wird auf ein stehendes Fahrzeug aufgefahren, ändert sich das Verhalten des Auffahrenden in Abhängigkeit von seiner Auffahrgeschwindigkeit. Ist er sehr schnell, wird sofort ohne Verzögerung (CV35 wird ignoriert) auf V-min abgebremst und dann bei Punkt drei angehalten. Fährt er mit einer mittleren Geschwindigkeit auf, wird verzögert (Wert aus CV35) auf V-min gebremst und dann wieder bei Punkt drei angehalten. Bei geringer Auffahrgeschwindigkeit wird die Geschwindigkeit ab Punkt eins langsam, bis Punkt zwei verringert und dann noch wieder bis Punkt drei mit V-min weitergefahren.
Nach einem Halt fährt ein Fahrzeug erst wieder weiter, wenn kein ASR low Signal mehr erkannt wird. Es beschleunigt dann mit CV3 wieder hoch und fährt gegebenenfalls auch wieder hinter dem Vordermann in der ASR weiter.
Für eine „geschmeidig“ wirkende ASR ist es wichtig, bei allen Fahrzeugen eine ähnliche V-min und auch eine ähnliche V-max mit CV2 und CV5 einzustellen. Die Beschleunigung in CV3 sollte so hoch gewählt werden, dass ein in der ASR folgendes Fahrzeug nicht „aufschaukelnd“ folgt. Beim wieder hoch Beschleunigen in der ASR wird der Wert in CV2 verdoppelt genutzt, um einem aufschaukelnden Verhalten entgegenzuwirken. Zum Bremsen wird hier der Wert aus CV35 verwendet.
Akku-Kapazitäten
Aus dem Forum:
C ist der C-Koeffizient. Er bezeichnet die Lade- bzw. Entladerade und bezieht sich immer auf die Nennleistung des Akkus. Der Wert ist immer ein Vielfaches oder ein Bruchteil der Nennleistung.
Wenn wir bei einem 30 mA Akku als Beispiel bleiben. Dann wäre das mal exakt ein 30 mAh Stunden Akku. D.h. wenn der voll ist und du belastest ihn mit 30 mA, ist er nach einer Stunde leer. Die Stromstärke in mA und die Zeit in h (oder Minuten) stehen immer in Korrelation. Wenn man den Akku jetzt mit 60 mA belastet, ist er dann nach 30 Minuten (1/2 Std) leer. Eine Verdopplung des Stroms bewirkt daher eine Halbierung der „Laufzeit“.
Der C-Koeffizient ist jetzt nichts anderes wie die Angabe, um wie viel mal mehr man den Akku belasten darf als der Nennleistung entspricht. Wenn da 3C oben steht, darf man den Akku mit maximal 90 mA belasten (bei 20 Minuten Laufzeit).
Das Gleiche gilt beim Laden. Jeder Akku hat daher genau genommen zwei C-Werte. Einer für das Laden und einer für das Entladen.
Beim Laden ist man mit 1C (bei LiPos) auf der sicheren Seite. Wenn es der Hersteller entsprechend spezifiert hast, darf man aber auch mit mehr - laut der C-Angabe - laden.
Bei einem 30 mAh Akku würde das bedeuten:
Laden 1C = Laden mit 30 mA Laden 1,5C = Laden mit 45 mA Laden 2C = Laden mit 60 mA
Leider ist das bei den kleinen Akkus die wir in den Autos verwenden sehr selten angegeben. Aber 2-3C Belastung sollte eigentlich immer gehen. Laden würde ich aber nur mit 1C. Geringfügig höher spielt keine Rolle.
Videos zum OpenCar-System

Auf dem YouTube-Channel von Kufenau, gibt es interessante Video-Tutorials zu dem Thema OpenCar-System, Car-Anlagenbau, Car-Rückmeldung, Fahrzeugbau und Konfiguration.
YouTube-Channel Kufenau OpenCar-System