Lokdecoder Übersicht
Bei der Inbetriebnahme des GBMBoost sind Unterschiede in der Implementierung von RailCom, bei verschiedenen Lokdekodern aufgetaucht. Dieser Link führt zu eine Übersichtsseite von railcomfähigen Lokdecodern und zeigt, welcher Dekoder ab welcher Softwareversion railcom-kompatibel ist.
http://www.opendcc.de/info/railcom/railcom_decoder_overview.html
Hinweis zu Zimo Decodern
Zimo Decoder reagieren empfindlich auf Analogspannung bzw. schwankende Gleichspannung, wie sie z.B. bei der Verwendung der Ersatzmessung am GBM-T vorkommen kann. Das kann in seltenen Fällen dazu führen, daß der Decoder in den Updatemodus wechselt. In diesem ist er vom Benutzer nicht mehr ansprechbar und muß eingeschickt werden.
Zimo empfiehlt deshalb, den Analogbetrieb auf Zimo Decodern zu deaktivieren (CV#29 Bit2=0) und die Updatesperre zu setzen (CV#144=128).
Grundlagen von Lastregelung bei Lokdecodern / OpenCarDecoder
Heutige Decoder haben im Prinzip alle eine Lastregleung, das geht wie folgt: Sagen wir, wir wollen 1000u/min am Motor erreichen, weil das einer bestimmten Geschwindigkeit der Lok entspricht. Die 1000U/min sind also der zu erreichende Sollwert. Der Decoder wird dazu die Endstufen so steuern, daß sie eine bestimmte Spannung (PWM, siehe unten erklärt) ausgeben, das ist der Stellwert. Der Motor setzt das in eine bestimmte Drehzahl um. Nun wirds interessant. Der lastgeregelte Decoder mißt diese Drehzahl bzw. eigentlich Belastung des Motors (meist über Gegen-EMK) und weiß somit, ob die gewünschte Drehzahl ansteht (Istwert). Nun vergleicht der Decoder den Sollwert mit dem Istwert. Sind beide gleich, so ist alles in Ordnung und es wird nichts verändert. Ist die Drehzahl aber nun durch Belastung (z.B. Beginn einer Steigung) etwas abgefallen, so sind Sollwert und Istwert nicht mehr gleich. Die Regelung des Decoders wird nun dem Motor eine etwas höhere Spannung zukommen lassen, und gleich wieder kontrollieren, ob Soll- und Istwert in diesem Fall gleich sind. Es wird also nachgeregelt, bis es wieder paßt, das Ganze funktioniert natürlich auch bei Entlastung des Motors. Diese ganze Regelung passiert viele Male pro Sekunde, so daß eine Lok quasi instant auf Laständerungen reagieren kann. Das gleiche Prinzip gibts im Auto auch, nennt sich Tempomat.
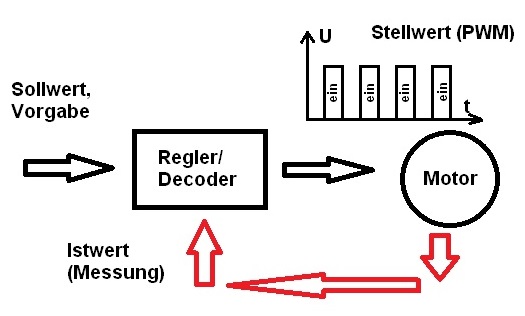
Zur Motorregelung oder auch Helligkeitsregelung einer LED ist PWM das Mittel der Wahl. Wenn man im Decoder intern jetzt 15V Gleichspannung zur Verfügung hat und der Motor auf halber Geschwindigkeit laufen soll, so würden 7,5V gebraucht. Das kann man mit PWM ganz elegant erreichen, in dem die Transistoren genau die Hälfte der Zeit (50%) ein und die andere Hälfte (50%) ausgeschalten sind. Im Mittel hat der Motor also jetzt 50% der 15V=7,5V anliegen. Möchte man schneller fahren, so wird das Verhältnis von Ein- und Ausschaltzeit einfach zu längeren Einschaltzeiten geschoben (z.B. 75% ein, 25% aus), im Mittel würde sich nun eine Spannung von 11,25V einstellen. Will man ganz langsam fahren, so könnte man mit z.B. 1% ein und 99% aus eine Mittelspannung von 0,15V am Motor erreichen ⇒ die Lok kriecht übers Gleis. Nachdem das PWM Verhältnis im Decoder digital erzeugt wird, sind es nicht 100 Möglichkeiten, sondern sogar 255 (8 Bit) verschiedene Werte, die das PWM Verhältnis einnehmen kann, somit sind auch 128 verschiedene Fahrstufen in der Lok problemlos möglich. In unserem Beispiel mit 15V würde man mit dem niedrigst möglichen PWM Verhältnis (1 on, 254 off) sogar nur ca. 0,06V am Motor erreichen.
PWM bei Motor und LEDs
PWM bei einem Motor: Rechnerisch ergibt sich eine Mittelspannung. Mit einer Gleichspannung von z.B. 0,15V macht ein Motor in der Lok gar nichts. Bei PWM dreht er sich trotzdem ganz langsam: Warum: in der kurzen Zeit, wo die Spannung (z.B. 15V) eingeschalten ist wird das Losbrechmoment überwunden.
PWM bei weißer LED: Die Emmision bei einer LED verändert die Farbtemperatur je nach Strom. Dimme ich also eine weiße LED mit Vorwiderstand runter, gibt es eine Farbtonveränderung. Dimme ich mit PWM, wird es dunkler, aber Farbton bleibt.
Achtung: Wenn die Schaltung, an der die LED hängt aber keine Stromquelle hat ist es trotzdem notwendig, da einen Vorwiderstand einzubauen.
Eine Stromquelle hat z.B. die Light-Control an ihren LED Ausgängen verbaut. Dort können bei Betriebsspannungen bis 5V dann die Vorwiderstände entfallen, bei höheren Betriebsspannungen muß trotzdem ein Vorwiderstand an die LEDs, damit der Ausgangstreiber nicht thermisch überlastet wird.